专业提供仓储物流升级改造、无人搬运机器人⌒产品
一家专注AGV、激光叉车、仓储机器ω人研发制造国家高新技术企业
全国服务热线 400-007-3860
一家专注AGV、激光叉车、仓储机器ω人研发制造国家高新技术企业
全国服务热线 400-007-3860







AGV(Automated Guided Vehicle)小车作为目前工业自动化系统中重要的组成部分,在工◣厂和厂房的物流调度系统中起着重要作用[1],有着非常广泛的应用前景。
传统的AGV小车控制以经典的PID控制为主,但PID控制的精确程度取决于系统数学模型的精确程度及参数设置状况[2]。AGV小车在工厂及厂房中的工作环境复杂,且在行驶过程中会受到各种工况的∴干扰,传统的 PID 控制有时很难达到难以效果[3]。
基于此,分析了模糊控制机理,针对 AGV 中直流电机的调速系统,采用模糊 PID 进行控制,极大地提高了智能小车转速控制的准确性、稳定性及反应速度。
AGV 系统装备了磁导航、CCD 导航、激光导航等[4],使得 AGV 在行驶过程中能够按照事先规划的路径运行,操作者只需根据上位机进行现场的实时调度,对于不同的现场运行情况 AGV 进行实时的现场调度,因此,大大降低了对于人力的依赖,提高了工作效率和①安全系数。
AGV系统通过贴在地面上的磁导航传感器进行导航,实时监控AGV小车现场位置,现场调度,避免AGV之间发生碰撞。AGV的供电系统由电池提供,两块电№池安装在AGV的两端(一般为对称安装),磁感应传感器安装在 AGV 的两端,产生一个☆闭环的系统来进行小车的实际位置╱的现场调节[5]。AGV大小有很多种分类,对于大型 AGV的调度需要▼考虑其安全范围是否足够,转弯时是否满足现场要求。AGV系统零件图如图 1 所示,其中①启动、停止、复位、急停按钮;②和③均为 12 V 电池;④轮子;⑤三色灯;⑥传送带;⑦触摸屏;⑧避障传感器;⑨对射※传感器。AGV伺服安装如图2所示,其中,①为前磁导航传感器;②为后磁导航传感器〗;③为伺服电机;④为伺服驱动器。

图1 AGV系统零件图
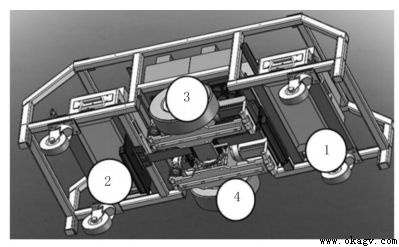
图2 AGV伺服安装ω 图
基于模糊PID的AGV转速控制如图 3 所示[6]。
驱动控制器控制红外传感器工作,根据收集到的路况循迹信息得到小车的速度给定值,同时,车轮速度检测模块检々测小车速度,进行隔离、放大、A/D 转换后与给定速度进行比较,若工厂的物流调度路径有上行、下行或转弯状况,速度检测模块即会表◎现出上升或下降现象,将此偏差信号送给模糊 PID 控制器,控制器进行模糊规则的选择,输出精确的速度脉冲信号送入电力电子执行机构,驱动直流电机精确的按照实际路况循迹速】度运行。
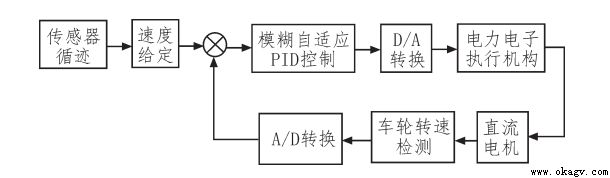
图3 AGV转速控制框图
模糊 PID 控制器结构如图 4所示,主要分为两个模块,其一□是传统的 PID 控制器,其二是模糊控制器,模糊控制器来实现 PID 控制器参数的现场确定,使得 PID控制效果更加理想化,模糊PID控制器主要是实现PID三大参数和误差e的变化率△e之←间的关系,在运行过程中根据误差和误差的变化率不断判断、计算最终的比例、积分、微分参数[7]。
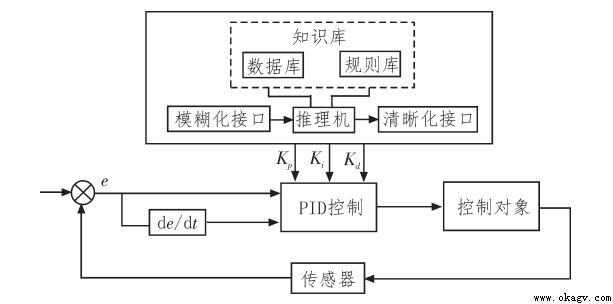
图4 模糊PID控制结构图
基于上述结【构,AGV转速控制模糊PID设计可分为以下 4个步骤[8-9]。
第一步,系统输入输出信号的确定。AGV小车数据采样是通过磁导航传感器的16位数字采样点,以I/O输入的模式进≡行,通过分析输入信号的不同来确定AGV小车实际所处的位置[10],磁导航为 16路 16点数字量输出,一般正常检查↓到的信号为 5路 5点数字量输出,理论分为下面 20种情况:
1000000000000000(1)
1100000000000000(2)
1110000000000000(3)
1111000000000000(4)
1111100000000000(5)
0111110000000000(6)
0011111000000000(7)
0001111100000000(8)
0000111110000000(9)
0000011111000000(10)
0000001111100000(11)
0000000111110000(12)
0000000011111000(13)
0000000001111100(14)
0000000000111110(15)
0000000000011111(16)
0000000000001111(17)
0000000000000111(18)
0000000000000011(19)
0000000000000001(20)
取直流电机角速度误差 e 和误差变化率 ec 为系统输入变量,ΔKp、ΔKi、ΔKd为输〖出变量。将误差 e 与误差变化率 ec的模糊基本论域取为[-6,6]。
通过比例、量化因子』映射到论域:设磁导航传感器的 16路输出依次从左到右为(1)→-6,(2)→-5,(3)(4)→-4,(5)(6)→-3,(7)→-2,(8)(9)→-1,(10)(11)→0,(12)(13)→1,(14)→2,(15)(16)→3,(17)(18)→4,(19)(20)→5
第二步,系统输入输出变量模糊化。
设计中将e、ec、ΔKp、ΔKi、ΔKd的量化等级均设为13级,即2个输入变量一个输出变量在模糊集上的论域为:{-6,-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5,+6}。对应⌒ 的模糊语言为{NB,NM,NS,ZO,PS,PM,PB},该集合中元素分别代表负大、负中、负小、零、正小、正中、正大[11-12]。把上述集合的元素描述为AGV 小车的加、减速状况,则为:NB 表╳示大减速、NM表示中减速、NS表示小减速、ZO 表示保持当前转速、PS 表示小加速、PM 表示中加速、PB 表示大加速。考虑到 AGV 小车在实际运行中产生的误差是随机的,因此,采用三角形隶属函数,如图 5所示。
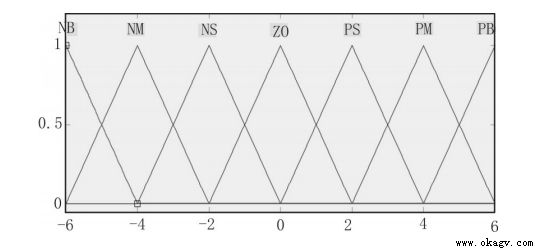
图5 三角形隶属函数图
第三步 模糊规则库的建立。
模糊规则库的建立即为找出运行时刻P、I、D与误差e及误差变≡化率ec之间的模糊关系。通过e和ec的变化规律,应用所制定的模糊控制规则,从而调整ΔKp、ΔKi、ΔKd三个参数值,使AGV小车在运行过程中有良好的动态性及稳定性[13-14]。应用在♂智能小车中,对速度误差e的控制规律尤为重要,不合适的控制规◥律会使AGV的速度产生振荡,对不同车间的不同路径没有很好的适应性。当车体实际运行速度和期望速度偏差e大时,为了加速系统的跟踪速度,应取较大的Kp;但是为了避免由于开始时偏差e的瞬间变大可能出现的微分过饱和而使控制作用超出许可范围,应取较小的Kd,同时为了防㊣止系统速度响应出现较大的超调,产生积分饱和,应对积分作用加以限制,通常取Ki=0等。根据AGV的操作经验@,可得转速控制输出参数(ΔKp、ΔKi、ΔKd)的模糊规则库如表 1所示[15-17]。
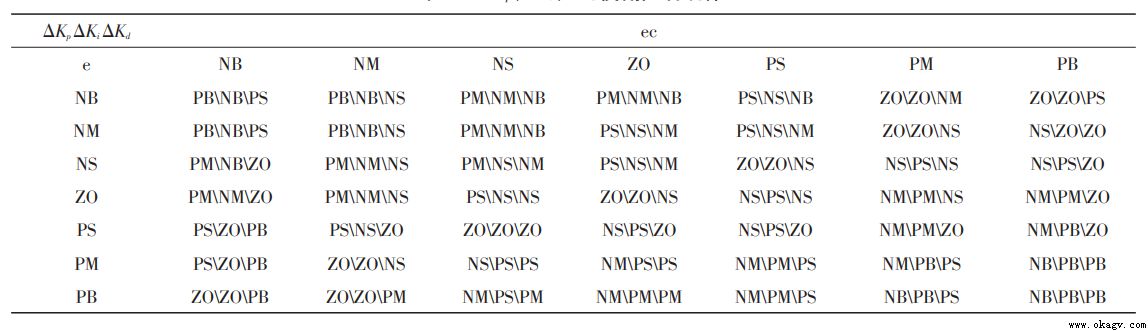
表1 ΔKp、ΔKi、ΔKd模糊控制规律
模糊控制器输出量是模糊量,不能直接用来控制直流电机的转速←,在AGV实际控制时要将这些结果转化为精确量。考虑到重心法能较好的反映控制量的真实分布情况,因此,在本设计中采用重心法对模糊变量进行转化。
文中采用AB PLC作为控制设备,用梯形图对PID控制器和模糊控制器进行设计,为了可以快速响应AGV小车的实际位置,采样时间设为100mms。电路和气路连接完成并检查无误后,通电下载程序并在线监控程序运行。连接路由器,进行 AB PLC 的 IP设置。具体的调试过程如下:
1)在主菜单画面中 LCD 的使用键盘上的 Up 和Down键选 Advanced Set。
2)通过点击 LCD 键盘上的 OK 键即可出现高级设置操作界面,如图 6 所示。该界面上有“Up”和“Down”上、下翻转键用来选择 ENET 功能,选择好之后点击 OK 键即可进入。
3)使用“Up”和“Down”上、下翻转键对 IP 地址进行设置,设置好的 IP地址点击 OK 键即可。
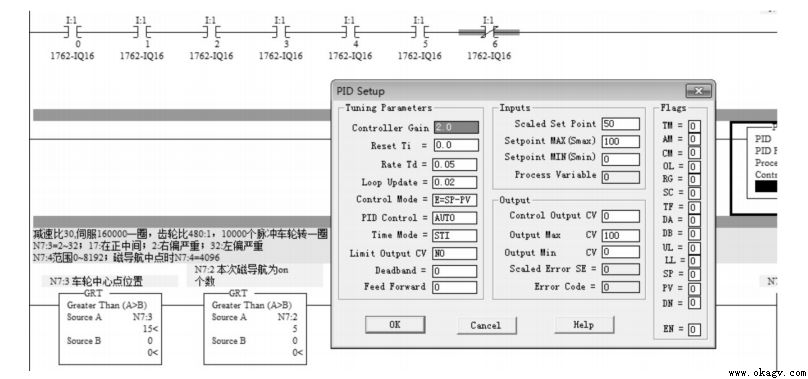
图6 PID参数∮程序调试界面图
4)输入密码操作界面,在本 AGV 小车控制系统中 ,通 过 Left、Right、Up 和 Down 键实现Master password的设置,该密码最大长√度为10位数字,在本操作系统中,设置 1234为 Master password。
5)密码验证界面,若输入的密码正确,则显示以太网网络类型选择界面,点击“Up”和“Down”上、下翻转键选择合适的网络类型;若输▃入密码不正确,则操作界面会提示密码有误的错误信息。
6)对网络的IP地址以及子网掩码等信息进行设置。调试过程完成后,图 7 和图 8 分别显示了传统PID 和本设计的模糊 PID 实现结果。可以看出,模糊PID 控制有较短的响应时间,较小的超调,能较快进入稳态,因此,能更好的跟踪 AGV 小车速速控々制。
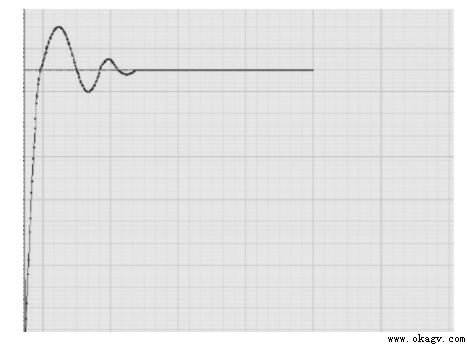
图7 PID响应图
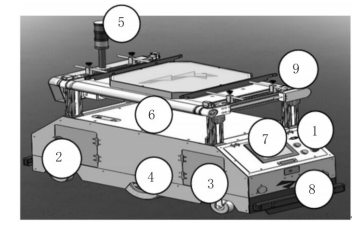
图8 模糊PID响应图
文中介绍▲了AGV小车的构成,在此基础上,针对小车的转速控制系统,设计了转速模糊PID控制器,并在PLC设备上进行了实际验证,与传统PID控制相比,AGV模糊 PID 转速控制器▃响应时间短,响应过程无振荡无超调,有较好的动、稳态性能。
[1] 曾炫. 基于模糊控制的磁引导AGV系统路径校正的应用研究[D]. 杭州:杭州电子科技大学,2015.
[2] Mendes J,Araujo R,Matias T,et al. Automatic extraction of the fuzzy control system by a hierar⁃ chical genetic algorithm[J]. Engineering Applica⁃ tions of Artificial Intelligence,2014,29(3):70-78.
[3] Baturone I,Moreno-Velo FJ,Śnchez-Solano S,et al. Automatic design of fuzzy controllers for carlike autonomous robots[J]. IEEE Transactions on Fuzzy Systems,2004,12(4):447-465.
[4] 宋学贤,谈宏华,潘正春,等. 基于自适应模糊PID的AGV高精度寻迹◥系统的研究[J]. 国内外机电一体化技术,2012(1):29-31.
[5] 武星,楼佩煌,唐敦兵. 自动导引车路径跟踪和伺服控制的混合运〓动控制[J]. 机械工程学报,2011,47(3):43-48.
[6] 叶金鑫. 基于模糊 PID 的智能小车控制算法研究[J]. 实验科学与技术,2016,14(1):46-47.
[7] 王述彦,师宇,冯忠绪. 基于模糊 PID 控制器的控制方法研究[J]. 机械科学与技术,2011,30(1):166-172.
[8] 黄友锐,曲立国.PID 控制ξ 器参数整定与实现[M].
[9] 汤红诚,李著信,王正涛,等. 一种模糊PID控制系统[J]. 电机与控制学报,2005,9(2):136-138.
[10]纪亚芳,张志刚. 基于模糊 PID 的双容水箱液位控制系统设计[J]. 山西师范大学学报(自然科学版),2019,33(2):37-40.
[11]李言民,苗欣,姜付杰,等. 基于模糊PID 控制器的多电机交叉耦合控制同步控制系统设计[J]. 电工技术,2005(3):118-120.
[12]王建红,陈耀忠,陈桂,等. 基于∩交叉耦合控 制的双电机同步控制系统研究[J]. 南京理工大学学报,2017,41(6):693-697.
[13]张小娟. 基于AT89S51单片◇机的除氧器温度控制系统的设计[J]. 纺织高校基础科学学报,2010(3): 372-376.
[14]鞠升辉,李杨民. 非完整约束移动机器人论域自调整模糊控制研◢究[J]. 电子设计工程,2016,24(5):103-106.
[15]徐郑林,朱建波,郑伟杰,等. 基于模糊控制的电动汽车充电器的研究[J]. 电子设计工程,2017,25(12):85-88.
[16]王璐.一种基于模糊控制的多传感器管理算法的研究[J].电子设计工程,2018,26(21):47-51.
[17]苏扬,刘文言,刘潇,等. 基于模糊控制↑的盲人避障系统设计[J]. 信息网络安全,2014(6):67-71.文章来源于AGV吧
上一条:智能工厂多搬运载体(堆垛机、AGV、机械手)协同作业优化 下一条:AGV智能仓储机器人结构优化设计
Copyright © 2012-2023 深圳市欧铠智能机器人股份有限公司 版权所有 粤ICP备 19115608 号 xml sitemap
联系电话
400-007-3860QQ咨询
2448209188微信

微信二维码