רҵ�ṩ�ִ������������졢���˰��˻����ˡв�Ʒ
һ��רעAGV������泵���ִ��������з�������Ҹ��¼�����ҵ
ȫ���������� 400-007-3860
һ��רעAGV������泵���ִ��������з�������Ҹ��¼�����ҵ
ȫ���������� 400-007-3860







�����������Ż����˼����Ŀ��ٷ�չ�������˵�Ӧ���Ѿ�Խ��Խ�㷺���Զ���������AGV��Ϊһ����ʽ�ƶ������ˣ����пɿ��Ըߡ��ʨ�Ӧ����ǿ���Զ����̶ȸߵ��ŵ㣬���ִ�����ϵ��ͳ�Ͳִ�����ϵͳ�б��㷺���ڻ���������봫�䣬�Ǧ� �ִ��ִ�ϵͳ����������ϵͳ�Ĺؼ��豸֮һ����������켣������ʵ��AGV�����ƶ��Ĺؼ�����������Ԥ���켣�ķ�������ʹ�÷��㡢�ɱ��͵��ص㣬Ŀǰ����Է�Ӧ���ڹ���ʵ�ʡ�����AGV���������֮�����ڷǡ�����Լ�������Խ�����Ϊ��ȷ���˨z��ѧģ�ͣ��ܶྭ�����Ŀ����㷨����PID�����㷨������ʵ�ֶ�ģ��������һ�ֻ���ʵ������ͨ�����������ķ�ʽ�����С�������㷨�����轨����ȷ����ѧģ�ͣ��ݴ��ܨ���ǿ��Ӧ���ڷ�����ϵͳ���ߩ����ϵͳ�ȿ���ϵͳʱ���źܺõ�Ч�������ݲ泵ʽAGV�Ľṹ�ص��������Ӧ��ģ�����������Ϻõؽ���˲泵ʽAGV�ڲ�ͬ·���µĴŵ������⡣
�泵ʽAGV�ĵ��̽ṹ��Ҫ������ʽ������ʽ������ʽ�泵AGV�Ȳ����ԡ�תҲ����ƽ�ƣ�����Ժͦơ��ȶ��Զ��ϲ��֡�����ʽ�泵AGV���������ʽ���ڶ������������������һ�������֣���������֧��ƽ������ܣ�Ҳ�ܸ���ת���ۺ��ԡ������ڶ���ʽ���ڴ����о����������ֲ泵ʽAGV����سߴ���ͼ1��ʾ��
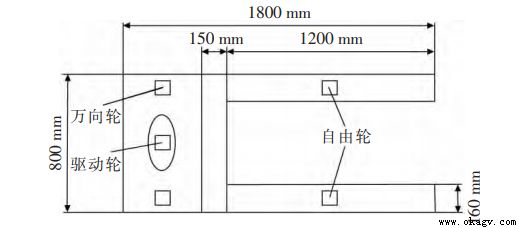
ͼ1 AGV�ĵ��̡�ṹ���ߴ�
���ǵ��泵ʽAGV����ʱ�İ�ȫ���ԣ�ͨ���豣֤�������˵�ǰ������AGV��������λ�������ĺ���������ˡ�����ʽ���ij�����Щ��ͬ���������ֺ�������Ϊ�������������˶����Խ��з֦�������ͼ2��ʾ�����ȼٶ�AGV����������Ħ�����ҵ���Ϊˮƽ�档��AGV����ת��ʱ�������磬��ҪAGV���Ϸ�ƫ��һ��λ�Ƶĺ�������ʻʱ����ʱ������������˳ʱ��ת�ﶯ��������AGV��ǰ��ʻ����������������Ԥ���ء��ĺ�����ȥ��Ȼ���������ٷ���ת����������������������ȥ���ù���ͨ���������ֵİڶ�Ч����AGV���˶��켣����������ĺ����ϡ����������������뺽������ʻ�ɵľ����Ϊ��������������������AGV�����ֵ�ת�١�������ת�����ٶ��Լ�2�����ߵ�ƫ���йء�
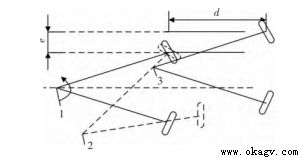
1��2��3�ֱ�Ϊ�泵�ھ��������г��ֵij�ʼλ�á��м���̡�����λ��
ͼ2�泵ʽAGV�����˶�
AGV�ĵ�����ʽ�ж��֣�Ŀǰ���ڳ��������4��,�ټ�������ü������Լ��Ƕ���ȷ�������Զ�λ����ʵ�֦簴�������Ĺ켣�˶������Ӿ�����ͨ�����ϵػ�ȡ��Χ�ij�����Ϣ����λ�����˶������б߶�λ�߽���������ͼ�����ս�������������ģ�ͣ��Ӷ�ʵ�֢������������۹��Ե���������֪λ����Ϣ��ͨ�����˶��������ٶȺͷ�λ�Ļ�������ȡ��������λ���Ӷ��ɴﵽ������Ŀ�ģ��ܴŵ���ͨ����Ԥ�訐·������������ķ�����װ��AGV�ϵĴŨ���������ȡ������Ϣ����ͨ����ʵʱ��ƫ���Ӷ���֤AGV����Ԥ��Ĺ���н������Ϸ�ʽ���У��ŵ�����ʹ�÷��㡢�ɱ��͵ȡ��ŵ�㷺Ӧ���ڹ���ʵ�ʣ����ڴ˻��ڴŵ���չ���о���
����ϵͳ��Ҫ�����֨}���ɣ�����֪���֡����߲��ֺ͡�ִ�в���,��ͼ3��ʾ��
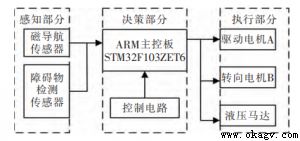
ͼ3 ����ϵͳ�����
1����֪������Ϊ��Ϣ�IJɼ��������ˣ��������������ƫ����Ϣ���˳е����������õ�STM32�����塣��Ҫ�к����������������������������������Ϣ�ڨ�Ϻ�ʶ��泵��Χ�ĨL������
2�����߲�������STM32F103ZET6Ƕ��ʽоƬΪ����ϵͳ�ĺ���оƬ����оƬ�ǻ���Cortex-M3���ںˣ�������Ч�ش�����֪���ִ���������Ϣ���������������Ľ�����͵�ִ�в��֣���ͼ4��ʾ��
ͼ4 ARM���ذ�
3��ִ�в�����Ҫ�ɡ�ת���ֵ����ֱ���ֵ���Լ�����ṹ��Һѹ������ɣ���ʵ�ֲ泵���ƶ��ͻ���ġ����͡�
��AGV��2�ֵ����ء��Ʒ�ʽ������Ԥ������������������ƺ��ֶ��������ơ�����������ϵͳ�ļܹ���ͼ5��ʾ�����У��ֶ����ƱȽϼ�ͨ���������AGVǰ�����ˣ�����AGV�ĵ��Ժ͡��˹���ʻ��
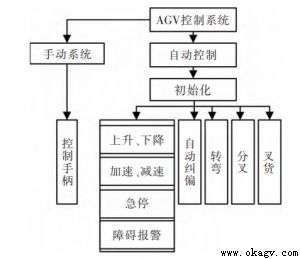
ͼ5 AGV����ϵͳ�ṹ
�Զ�����ģʽ�£�һ������Ҫʵʱ��ȡAGV���Ԥ��š�����ƫ��������ͨ����ƫ����ʱ�ؼ�Сƫ���һ������ڰ�ȫ���ǣ����С����ⷢ�����ߴ��������ϰ������ʱ��AGVӦ�ܹ��Զ������ƶ��������ϰ����Ƴ��ƺ���Իָ�����״̬�����⣬��ʵ�ʹ����У�ֱ������ʻ��AGV�ƶ�����Ҫ�˶�״̬�����ǵ�����Ч�����⣬����Ҫ��д�Ӽ��ٳ̡�����ˣ����Զ�����ģʽ����Ҫ��Ҫ��д�Զ���ƫ�������ƶ����Ӽ��ٳ���ת������Լ��������ٽ�����
ģ��������һ��ģ����˼ά�Ĺ��̣�������ͨ����������й۲졢���������������ж�����ߡ�L.A.Zadeh���������ԭ���z������ϵͳ�ĸ��Ө�������ϵͳ�������̶Ⱦͻ����ͣ����ﵽ��һ������ֵʱ�������Ժ����Խ������ų⣬���ǾͲ�����ģ�������ư���ģ��������һ�ַ����Կ��ƣ�����������ģ�����ϵ�����֪ʶ���������㷨��ת��Ϊ����������������������ԡ�����ģ�����ƾ��н�ǿ��³���ԣ�����Ҫ������ȷ������ѧģ�ͣ��������ڡ����������ԡ�ǿ���ʱ����ȿ���ϵͳʱ�нϺõ�Ч����
ģ�����������Ĺ���ԭ���ǽ����˵������źž���ģ�����ӿڱ��ģ������Ȼ��ģ���������㷨���㣬����ģ��������������õ�ģ�����ϣ������ȥģ������ģ�����ϱ�����������������ģ��������ϵͳ�ṹ��ͼ6��ʾ��
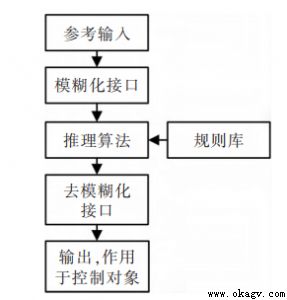
ͼ6 ģ���������Ľṹ
��ƫ�������Զ�����ģʽ�еĺ��ģ���ƫ����Խ����,AGV�Ĺ켣�������ܾ�Խ�á���AGV������ֱ��ת��ǶȲ��Ǻܴ�Ļ�����ʱ�������þ�ƫ����
��AGV�����õĴŵ����������ߡ���16�����źż��㣬��װ��AGVǰ�ˣ��������2����ѡ��Ĩ���������Ϊ3���ڴ�����ֱ�����ϡ����Ŵ���������ͬʱ�ӡС�ͨ4�����źţ�Ϊȷ��AGV��Դ�����λ�ã����Ŵ���������������б�ţ�H0��H15�ɷֱ�Ϊ16�����㣬�Ե͵���0��ʾδ�����źŨ������Ըߵ���1��ʾ�����źš���������ź�ʱ��ָʾ�ơ��������еĵ�����Ϣ���δ洢�ڼĴ����У���ռ��16�ֽڡ���ƫ��������Ҫ���ƫ�������ȡ����ֱ�С���ƫ����ƫ�ġо�ƫ�����������м��4�������Ӧ��ָʾ������ʱ����ʱ��Ӧ��λΪ1����ʾAGV����ֱ��״̬������1��

�� 1 �Ŵ�������Ӧ������ I/O �˿�
���ǵ����治��ȫƽ����Ӧ������һ���ġ���Χ�������м�4��������������ġ���һ��ָʾ������ʱ��Ҳ��Ϊֱ��״̬�����������������ɽ���������λ���ģ����Ϊ3��ƫ��I״̬������2��
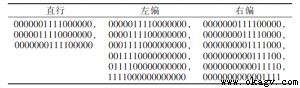
��2 ���֡С�ƫ��״̬
ΪʹAGV�����й켣��Ԥ��켣���ӽӽ����ڱ�д����ʱ�����ݲ�ͬ��ƫ�Ƴ̶�ʹת�������������������ͬ���Ҿ�ƫ�����еĨ�ת��Ӧ���2�෴��
ѡȡ��ʵ���Ҹ����AGV��Ϊ�켣���ٵ����������ͼ7��ʾ��

ͼ 7 �泵ʽ AGV ����װ��
ͼ�У��Ŵ��Ӹ���λ��AGV���������������ϣ�������ľ���Ϊ2cm��������ֱ�С�ת�䡢�����ж����λ�õ�����·��������·���w��������һ�������ʹ��Ҫ����ʵ�ʹ�����Ҫ��Ԥ�̡���ŵ����ߣ�����켣·���滮���ͼ8��ʾ�����ص�AGV��ͣ����A�������ش����ƶ���λ��C��Ȼ��AGV��λ��C�˶����ơ�λ��D����Ȼ��ֱ����E���ֿ⣬��������˻���ײ�ȡ���ϣ�����������˵�λ��F��Ȼ���ش���������λ��F'��Ȼ����ԭ·�ߡ᷵����λ��A��
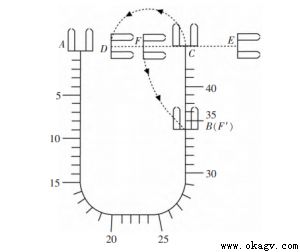
ͼ 8 ����켣·���滮
AGV�Ĺ켣�����Ǩ�ָ��AGV����Ԥ����õĴ����ƶ�������Ҫͨ��ʵʱ�ص����ٶ�ʸ����ʹAGV�����ڴ����Ϸ��ƶ������ݴŴ�������Ӧ���Ĵš��źţ��ɵõ�λ�Ƶ�ƫ����һһ��ƫ1~4λ����ƫ1~4λ������ƫ�����IJ�ͬʹת���L�������ͬ��ת�����y�غ��������ء�AGV���ܲ��Խ��Ҧ���������ʽʵ����AGV���о�����,�ڴ���������������20CM��3CM�İ�ɫ����־������ͼ9��ʾ�������⽫ˮ�Ի��ʹ̶��ڴŴ�����������λ�ô�����ʹ�����ʱ�о�պ����־����Ӵ�����¼AGV��ʵ���˶��켣��

ͼ 9 AGV ģ�������Զ�����ϵͳ����
�ڽ���һ���β�����ͻ��ͦ�ж���Ը��u��־���ϵıʼǽ��в������ֱ��¼����־���ʼ��ĺ���ƫ�ƾ��룬��MatLab������õ��Ľ����ͼ10��ʾ��
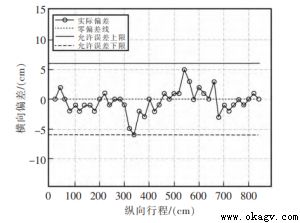
ͼ 10 AGV ����������
��ͼ�ɼ���AGV�ڸգ� ����ʱƫ�Χ��С�����ƫ��Ϊ2cm������ֱ��·��ʱ��ƫ�����ɺ�С�����ߡ�ת��·��ʱ��AGV��ƫ�������������һ����Χ��ʼ��С���̶����������ˣ��泵ʽAGV����ת��·��ʱ������·�������۵ġ����������ɼ���AGV��ƫ�ΧΪ��6cm������������Ƶ�ƫ��Ҫ�����Χ��
��Բ泵��ʽAGV���˶��ʹŵ����ص㣬�����һ��ģ�����������ԴŴ���������ȡ��������ƫ���źŽ��з�������������ģ�����ƹ������������������������ʵ�ʹ����еĸ��֦�·�������켣��ͨ����д����ʵ��AGV���������������AGV�ľ���ƫ����������������������ģ�����Ƶģ��泵ʽAGV���нϺõĹ켣�������ܡ�
[1] ������¥��ͣ�Ǯ����.�ں϶�ģ���ӿ�������ȫ��λ�ƶ� AGV·�����ٿ��Ƽ���[J].��е��������칤�̣�2016��45��7����57-61.
[2] �Ώ�����ʦ��.�ŵ��� AGV ���ǿ��ѧϰ·�����١����Ʒ���[J].���ݵ��ӿơ̼���ѧѧ������Ȼ���ѧ�棬2019��39��2����28-34.
[3] Chen D D��Shi Z Y��Yuan P J��et al. Trajectory tracking controlmethod and experiment of AGV[C]//2016 IEEE 14th InternationalWorkshop on Advanced Motion Control ��AMC��.IEEE��2016��24-29.
[4] ��춹�����ף��ܳ��壬��.����ģ�� PID ���Ƶ� AGV ����[J].���ǹ��Զ�����2017��36��12����76-79.
[5] ����. ���ڲ�ͬ��ʽ AGV �Ľ�ģ���켣���ٿ��Ʒ�������ƺ�Ӧ��[D].���ݣ��㽭��ѧ��2018.
[6] ��������������ǣ���.˫��˫�� AGV �������˶�ѧ����������[J].����ҵ�Զ�����2016��38��3����42-46��56.
[7] �� �� ��.AGV ϵ ͳ �� �� �� �� ʽ �� չ �� �� �� ��[J].�� �� ũ �� ��2017��48��4����80.
[8] ���л�. �ŵ����z�泵ʽ AGV ���Ƶ���ϵͳ���о��뿪��[D].������������ѧ��2017.
[9] �˿�������.ģ�����Ƶ�Ӧ����״�뷢չ����[J].�����Զ��������DZ���2017��44��9����811-812��902.
[10] Xiong B��Qu S R. Intelligent vehicle��s path tracking based onfuzzy control[J].Journal of Transportation Systems Engineering andInformation Technology��2010��10��2����70-75������Դ��AGV��
��һ����AGV�ĺ��ļ�������Щ�� ��һ����AGV��BEV��������װ�����е�Ӧ�����
Copyright © 2012-2023 ������ŷ�����ܻ����˹ɷ�����˾ ��Ȩ���С���ICP�� 19115608 ����xml sitemap
��ϵ�绰
400-007-3860QQ��ѯ
2448209188��

�Ŷ�ά��